机械原理重要概念
零件:独立的制造单元
构件:机器中每一个独立的运动单元体
运动副:由两个构件直接接触而组成的可动的连接
运动副元素:把两构件上能够参加接触而构成的运动副表面
运动副的自由度和约束数的关系f=6-s
运动链:构件通过运动副的连接而构成的可相对运动系统
平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副
机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目;根据机构的组成原理,任何机构都可以看成是由原动件、从动件和机架组成
高副:两构件通过点线接触而构成的运动副
低副:两构件通过面接触而构成的运动副
由M个构件组成的复合铰链应包括M-1个转动副
平面自由度计算公式:F=3n-(2Pl+Ph)
局部自由度:在有些机构中某些构件所产生的局部运动而不影响其他构件的运动
虚约束:在机构中有些运动副带入的约束对机构的运动只起重复约束的作用
虚约束的作用:为了改善机构的受力情况,增加机构刚度或保证机械运动的顺利
基本杆组:不能在拆的最简单的自由度为零的构件组
速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。若绝对速度为零,则该瞬心称为绝对瞬心
相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是
三心定理:三个彼此作平面平行运动的构件的三个瞬心必位于同一直线上
速度多边形:根据速度矢量方程按一定比例作出的各速度矢量构成的图形
驱动力:驱动机械运动的力
阻抗力:阻止机械运动的力
矩形螺纹螺旋副:
拧紧:M=Qd2tan(α+φ)/2
放松:M’=Qd2tan(α-φ)/2
三角螺纹螺旋副:
拧紧:M=Qd2tan(α+φv)/2
放松:M=Qd2tan(α-φv)/2
质量代换法:为简化各构件惯性力的确定,可以设想把构件的质量按一定条件用集中于构件上某几个选定点的假想集中质量来代替,这样便只需求各集中质量的惯性力,而无需求惯性力偶距,从而使构件惯性力的确定简化
质量代换法的特点:代换前后构件质量不变;代换前后构件的质心位置不变;代换前后构件对质心轴的转动惯量不变
机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动
判断自锁的方法:
1、根据运动副的自锁条件,判定运动副是否自锁
移动副的自锁条件:传动角小于摩擦角或当量摩擦角
转动副的自锁条件:外力作用线与摩擦圆相交或者相切
螺旋副的自锁条件:螺旋升角小于摩擦角或者当量摩擦角
2、机械的效率小于或等于零,机械自锁
3、机械的生产阻力小于或等于零,机械自锁
4、作用在构件上的驱动力在产生有效分力Pt的同时,也产生摩擦力F,当其有效分力总是小于或等
于由其引起的最大摩擦力,机械自锁
机械自锁的实质:驱动力所做的功总是小于或等于克服由其可能引起的最大摩擦阻力所需要的功提高机械效率的途径:尽量简化机械传动系统;选择合适的运动副形式;尽量减少构件尺寸;减小摩擦
铰链四杆机构有曲柄的条件:
1、最短杆与最长杆长度之和小于或等于其他两杆长度之和
2、连架杆与机架中必有一杆为最短杆
在曲柄摇杆机构中改变摇杆长度为无穷大而形成的曲柄滑块机构
在曲柄滑块机构中改变回转副半径而形成偏心轮机构
曲柄摇杆机构中只有取摇杆为主动件是,才可能出现死点位置,处于死点位置时,机构的传动角为0
急回运动:当平面连杆机构的原动件(如曲柄摇杆机构的曲柄)等从动件(摇杆)空回行程的平均速度大于其工作行程的平均速度
极为夹角:机构在两个极位时原动件AB所在的两个位置之间的夹角θ
θ=180°(K-1)/(K+1)
压力角:力F与C点速度正向之间的夹角α
传动角:与压力角互余的角(锐角)
行程速比系数:用从动件空回行程的平均速度V2与工作行程的平均速度V1的比值
K=V2/V1=180°+θ/(180°—θ)
平面四杆机构中有无急回特性取决于极为夹角的大小
试写出两种能将原动件单向连续转动转换成输出构件连续直线往复运动且具有急回特性的连杆机构:偏置曲柄滑块机构、摆动导杆加滑块导轨(牛头刨床机构)
曲柄滑块机构:偏置曲柄滑块机构、对心曲柄滑块机构、双滑块四杆机构、正弦机构、偏心轮机构、导杆机构、回转导杆机构、摆动导杆机构、曲柄摇块机构、直动滑杆机构
机构的倒置:选运动链中不同构件作为机架以获得不同机构的演化方法
刚性冲击:出现无穷大的加速度和惯性力,因而会使凸轮机构受到极大的冲击
柔性冲击:加速度突变为有限值,因而引起的冲击较小
在凸轮机构机构的几种基本的从动件运动规律中等速运动规律使凸轮机构产生刚性冲击,等加速等减速,和余弦加速度运动规律产生柔性冲击,正弦加速度运动规律则没有冲击
在凸轮机构的各种常用的推杆运动规律中,等速只宜用于低速的情况;等加速等减速和余弦加速度宜用于中速,正弦加速度可在高速下运动
凸轮的基圆半径是从转动中心到理论轮廓的最短距离,凸轮的基圆的半径越小,则凸轮机构的压力角越大,而凸轮机构的尺寸越小
齿廓啮合的基本定律:相互啮合传动的一对齿轮,在任一位置时的传动比,都与其连心线O1O2被其啮合齿廓在接触点处的公法线所分成的两线段长成反比
渐开线:当直线BK沿一圆周作纯滚动时直线上任一一点K的轨迹AK
渐开线的性质:
1、发生线上BK线段长度等于基圆上被滚过的弧长AB
2、渐开线上任一一点的发线恒于其基圆相切
3、渐开线越接近基圆部分的曲率半径越小,在基圆上其曲率半径为零
东南大学机械原理重要概念
本站小编 免费考研网/2015-12-29
相关话题/机械原理
领限时大额优惠券,享本站正版考研考试资料!
 优惠券领取后72小时内有效,10万种最新考研考试考证类电子打印资料任你选。涵盖全国500余所院校考研专业课、200多种职业资格考试、1100多种经典教材,产品类型包含电子书、题库、全套资料以及视频,无论您是考研复习、考证刷题,还是考前冲刺等,不同类型的产品可满足您学习上的不同需求。 ...考试优惠券 本站小编 Free壹佰分学习网 2022-09-19
优惠券领取后72小时内有效,10万种最新考研考试考证类电子打印资料任你选。涵盖全国500余所院校考研专业课、200多种职业资格考试、1100多种经典教材,产品类型包含电子书、题库、全套资料以及视频,无论您是考研复习、考证刷题,还是考前冲刺等,不同类型的产品可满足您学习上的不同需求。 ...考试优惠券 本站小编 Free壹佰分学习网 2022-09-19《机械原理》东南大学郑文纬 吴克坚编思考题
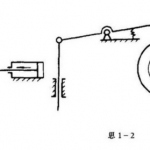 思考题 第一章机构的结构分析 思1-1图示机构为流水线上阻挡工件前进的机构。要求汽缸右端进气时,摆杆从实线摆到虚线所示位置;汽缸左端进气时,摆杆摆回实线所示位置。问 该机构运动简图能否实现上述预期运动?为什么? 思1-2图示凸轮控制的直线往复运动机构。要求凸轮转动时冲杆上下运动。问该机构运动简图能否实现预 ...专业课考研资料 本站小编 免费考研网 2015-12-29
思考题 第一章机构的结构分析 思1-1图示机构为流水线上阻挡工件前进的机构。要求汽缸右端进气时,摆杆从实线摆到虚线所示位置;汽缸左端进气时,摆杆摆回实线所示位置。问 该机构运动简图能否实现上述预期运动?为什么? 思1-2图示凸轮控制的直线往复运动机构。要求凸轮转动时冲杆上下运动。问该机构运动简图能否实现预 ...专业课考研资料 本站小编 免费考研网 2015-12-29中国矿业大学2008机械原理考研真题
专业课考研资料 本站小编 免费考研网 2015-12-20中国矿业大学2010机械原理考研真题
专业课考研资料 本站小编 免费考研网 2015-12-20上海交通大学2013机械原理与设计考研真题详细答案解析
专业课考研资料 本站小编 免费考研网 2015-12-122014年华中科技大学《806机械原理》硕士研究生初试试题(回忆版)
一、分析简答分析简答((24分,每题4分) 1、试分析并简述车床加工阶梯轴时,刀架进给凸轮的工作工程对凸轮机构从动件运动规律有何要求,并画出机构工作远离草图。 2、试分析并简述根据给定两连架杆的位置设计四杆机构的过程。 3、根绝机构组成特点,举出两种能扩大从动件工作行程的机构,并画出机构草图。 4、试根 ...专业课考研资料 本站小编 免费考研网 2015-12-072013年哈尔滨工程大学《818机械原理》考研试题(回忆版)
一、判断题(20分) 十个小题,想不起来了,都不难正常来说都能得至少16分以上。 二、简答题(30分) 五个简答题每题6分 1. 解释什么是急回特性?行程速比K?例举一个工程实例。 2. 对心曲柄滑块机构曲柄长度a和行程H之间的关系,求出行程速比K。 3. 哪种凸轮机构设计过程中可能出现运动失真?如何避免失真。 4. 例举 ...专业课考研资料 本站小编 免费考研网 2015-12-072013年哈尔滨工业大学《839机械设计基础(含机械原理与机械设计)》考研试题(回忆版)
2013年哈尔滨工业大学839机械设计基础(含机械原理 与机械设计)与机械设计)考研试题(考研试题(回忆版)回忆版) 一.填空20x1=20 1 螺纹和螺旋传动的线数一般不少于10的原因 2带传动中一般把松边放在上边的原因 3带传动中带类型的选择是根据什么因素决定的 4带传动中问带的角度与带轮的角度那个大 5滑动轴承的问题 ...专业课考研资料 本站小编 免费考研网 2015-12-072014年大连理工大学机械原理考研复试试题(回忆版)
机械原理 一、选择: 1、径向滑动轴承形成动压油膜的过程,给了四个图哪个对。 2、模数越大齿根弯曲强度越大,如何提高滑动轴承的承载能力:减小相对间隙。 二、(8分)自由度 指定教材原题 开窗户那个 问 ...专业课考研资料 本站小编 免费考研网 2015-12-072013年北京交通大学《969机械原理》考研试题(回忆版)
1.机构的结构分析,计算自由度、划分杆组、确定机构级别。 2.机构的运动分析,竟然没有考相对运动图解法,用瞬心法进行速度分析。 3.平面连杆机构设计,计算最小压力角。 4.机构的力分析,确定转动副、移动副总反力的作用线和方向,写出力平衡矢量方程式,计算驱动力和效率。 5.凸轮机构设计,往年真题原题。 ...专业课考研资料 本站小编 免费考研网 2015-12-072014年山东大学《机械原理》考研真题(回忆版)
2014年山东大学机械考研真题(回忆版) 2014山大机械考研真题 1.什么是局部自由度,作用?什么是虚约束,作用? 2.直齿圆锥齿轮背锥齿形特点?何为其当量齿轮与当量齿数? 3.凸轮机构中等速运动规律的冲击,使用场合?等加速等减速运动的冲击,使用场合? 4.导键与滑键区别? 5.当量弯矩的公式?其中a的含义?正反转时 ...专业课考研资料 本站小编 免费考研网 2015-12-07
